
Kuidas kasutada DJI automaatse kojutuleku (Return to Home-RTH) funktsiooni turvaliselt
DJI Tagasi-koju funktsioon võimaldab droonil automaatselt naasta stardipaika. Kuidas aga kasutada seda nii, et droon alati tervena tagasi jõuaks? Vaatame järgi.
Automaatselt-koju funktsiooni 3 erinevat varianti:
Madala akutaseme (Low Battery) RTH
Just madal akutase mõjutab kõige rohkem drooni tagasilendu stardipaika. Kui akutase on madal, ilmub nutiseadme ekraanile vastav teade ning kui piloot seda teadet käsitsi ei tühista, tõuseb droon automaatselt eelseadistatud kõrguseni ja alustab tagasilendu. Kui aku tase on juba kriitiliselt madal (näiteks juhul, kui piloot katkestas automaatse naasmise), alustab droon maandumist, mida piloot enam katkestada ei saa. Küll aga saab piloot suunata drooni laskumise ajal.
Pigem tasuks madala akutaseme RTH-d ennetada, sest see ei pruugi alati tähendada sajaprotsendilist tagasijõudmist – näiteks juhul, kui tuul on vastu lennusuunale.

Ohutuse tagamise süsteemi (Failsafe) RTH võimalused
Failsafe RTH aktiveerub, kui droon kaotab puldi raadiosignaali 3 sekundiks või nutiseadme WiFi-signaali 20 sekundiks. Kui nii peaks juhtuma, siis on droonil kolm erinevat käitumisvõimalust vastavalt seadistustele.
Esimene võimalus – kui on aktiveeritud Failsafe RTH, siis droon tõuseb määratud kõrgusele ja hakkab stardipaika lendama. Kui puldi juhtsignaal taastub, on võimalik RTH tühistada.
Kui seadetest on seadetest on valitud Hover (hõljumine), siis jääb droon jääb samasse kohta hõljuma ning puldiga drooni suunas liikudes on võimalik signaal taastada. Juhul, kui signaal ei taastu, käivitub droonil lõpuks Low Battery RTH ning ta lendab tagasi stardipaika.
Kolmanda variandina on võimalik sättida seadeid nii, et juhtsignaali katkemisel droon maandub oma asukohas.
Tark (Smart) RTH
Seda funktsiooni on võimalik aktiveerida, vajutades puldil või äpis RTH-nuppu. Peale nupuvajutust hakkab droon stardipaika tagasi lendama ning seda funktsiooni saab igal ajal tühistada, vajutades puldil Flight Pause–nuppu, RTH-nuppu uuesti või Stopp-nupu ikooni äpis. Kui tegu on Phantom 4 Pro’ga või Advanced mudeliga, järgib droon kõigepealt 30 sekundi jooksul oma eelnevat lennutrajektoori ning alles siis tõuseb eelseadistatud kõrguseni ja lendab otse stardipaika.
Tasub meeles pidada, et kui droon ei ole piloodist kaugemal kui 20 meetrit, siis maandub ta RTH nuppu vajutades hetkeasukohas. Kui maandumine on tänu maastikule raskendatud või ohtlik (seda funktsiooni saab seadetest (de)aktiveerida), siis jääb droon madalale kõrgusele hõljuma, proovib leida sobivamat maandumiskohta või ootab, kuni piloot võtab üle kontrolli ja maandab drooni käsitsi.
RTH seaded DJI GO/4 rakenduses
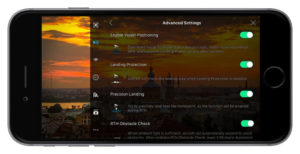
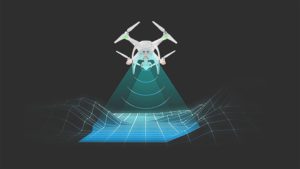
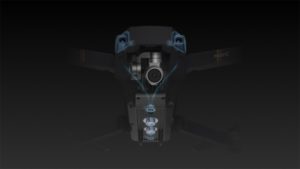
Enable Vision Positioning (alumiste kaamerate abil positsioneerimine) peaks olema aktiveeritud, et tagada Landing Protection ja Precision Landing-funktsioonide töö. Vision Positioning tähendab, et droon orienteerub maapinna suhtes alumiste kaamerate abil. Selle funktsiooni väljalülitamine võiks olla põhjendatud näiteks peegeldava (vee)pinna kohal lennates
Landing protection tähendab, et droon skaneerib enne maandumist pinnase sobivust. Kui droon ei leia koheselt sobilikku kohta maandumiseks, otsib ta uue koha või jääb hõljuma. Kui see funktsioon on aktiivne, ei tohiks droon vette maanduda.
Precision landing (täpne maandumine) tähendab, et droon salvestab foto stardipaigast ning oskab naasta täpselt sinna
.
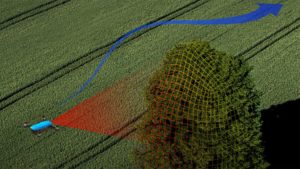
RTH Obstacle Check (takistuste vältimine) tähendab, et droon väldib tagasilennates takistusi, lennates neist vajaduselt üle. Kui RTH Obstacle Check on aktiveeritud, toimib see ka juhul, kui Obstacle Avoidance (takistuste vältimine tavalennus) on deaktiveeritud
.
Kõik need seaded on vaikimisi aktiivsed ja hea mõte olekski need nii jätta. Sellegipoolest tasuks aeg-ajalt kontrollida, et neid poleks kogemata deaktiveeritud.
Erandiks on droon Spark, mille puhul on seadetes vaid üks valik Sensor State, mis tähendab, kas sensorid on aktiivsed või mitte.
Kuidas kasutada RTH funktsiooni turvaliselt?
Alustuseks peaksite oma stardipunkti salvestama, mida teeb droon automaatselt, kui “nähtaval” on nähtaval vähemalt 10 satelliiti. Stardipunkt võib olla drooni asukoht õhkutõusul või puldi asukoht – veenduge, et seadetest on valitud õige variant. Viimasel juhul saab droon puldi asukohainfo nutisaedme GPSi kasutades.
Lisaks peaks olema kindel, et drooni RTH lennukõrgus on suurem kui piirkonnas olevate objektide/ehitiste kõrgus. Tavaliselt on 60 meetrit piisav, kui tegu pole just kõrghoonete või mastide lähedusega.
Peale drooni tarkvarauuendust tasub RTH kõrgus kindlasti üle kontrollida.

Spark toimib teistest DJI droonidest veidi erinevalt. Kui Sparkil aktiveerida RTH funktsioon ja droon on 3-20 meetri kaugusel enda kodupunktist, siis käivitub automaatne maandumine juhul, kui seadetest on deaktiveeritud RTH at Current Altitude (RTH samal kõrgusel, vaikeseade). Kui RTH at Current Altitude on aktiivne, siis Spark ei tõuse enne naasmist, juhul kui kõrgus on suurem kui 2,5 meetrit. Kui kõrgus on väiksem, siis tõuseb droon 2,5 meetri kõrgusele ja naaseb stardipunkti. Kui aga droon on kaugemal kui 20 meetrit, siis tõuseb ta eelseadistatud RTH kõrguseni enne naasmist.
Kui droon on kaugemal kui 100 meetrit, siis RTH aktiveerumisel naaseb droon kiirusega 10 m/s ning ei väldi takistusi. Kui droon on lähemal kui 100 meetrit, suudab ta vältida takistusi, kui valgusolud on kaamerate tööks piisavad..
DJI RTH funktsioon on väärt turvameede, mis suudab drooni tervena koju tuua nii signaali kadumisel kui aku tühjenemisel, kuid väärtuslikuks muudavad selle õiged seadistused.
Allikas: https://store.dji.com/guides/how-to-use-the-djis-return-to-home/



